
袖珍型 Delta 並聯式機器人。
現今各式各樣的微裝配任務對驅動技術的要求越來越高。微型元件以及微型系統的尺寸越來越小,廣泛來看,製造系統的發展卻呈現落後狀態。藉由推出一系列Delta機器人,一個來自瑞士西部的公司顛覆了當今市場的情勢。而強勁的maxon馬達確保了高精準和高動態的動作。
Asyril 擅長於微技術、奈米科技和生物技術等領域,透過機電系統的研發與整合,專門製作快速靈活的自動化小型元件和微型組件。2007 年,微型機器人專家Dr. Alain Codourey結合了CSEM與CPA集團的知識技能,創辦了 Asyril 公司。而在這之前,一切的核心問題是:真的有可能製作出一個身型僅100 x 100 x 100 mm³ 的微型機器人嗎?再者,要如何為這樣一個機器人實現最理想的運動設計?大約在10年前,瑞士微技術和電子技術中心 (CSEM) 的研究人員便已認知到元件微型化的趨勢,但許多生產系統卻仍維持原狀,使得兩者之間的差距日漸加劇。機器人的機械結構易於小型化,但驅動系統卻受到一定的限制:「在一般的系統裡,相對於整個機械裝置,馬達的尺寸相當大。因此,即使是像機器支接臂的一般運動也不適用,因為我們仍然將較大的馬達安裝在關節裡。」, Dr. Alain Codourey解釋。
為了縮小這項日漸增大的差距,微型機器人專家Codourey率領在CSEM以及Biel高等專科學校的研究團隊,開始尋找最適合用於處理微技術組件的系統。「根據最後得出的結果,並聯式運動結構是最有潛能可以符合我們目標需求的系統。」, Codourey作出說明。
接下來的首先要務便是對並聯式運動軸系統作出更進一步的改良。為了將轉動慣量降到最低,所有元件的重量都儘量減至最輕,且外型儘可能細微。所選用的並聯配置優勢在於,maxon馬達雖然是負責動作的元件,但本身卻不會移動。因為馬達固定於支架上,並將動作直接傳輸到結構上。這項原理被運用在Delta並聯式機器人全系列產品中:「Desktop Delta」、「Power Delta」、「Pocket Delta」都採用同一原理製作而成。
纖細的傳動裝置用於微型安裝
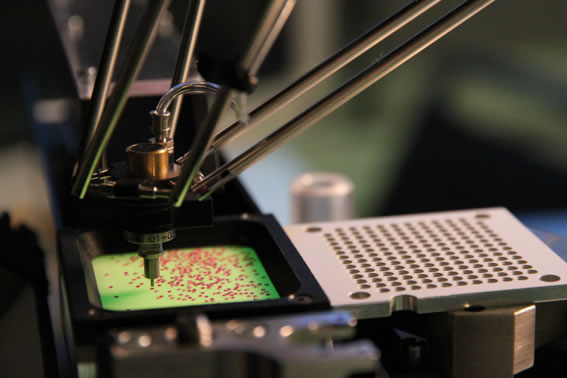
不只是機械設備需要進行「瘦身」,連傳動裝置本身也得跟著縮小。在Pocket Delta(口袋型 Delta 機器人)中,大體積、大功率、外加高熱輻射的馬達將被節省空間的maxon motor微型馬達取代。機器人的並聯式機械裝置將由三具安裝於機器人上方面板的EC-i 40進行驅動;受到移動的質量非常小,機器人因此能保有高度活動性。Pocket Delta僅需0.33秒便可完成一個取放循環,等於每秒鐘可完成三個循環。同時結合了高鋼性運動結構,使此機器人的重複精確度高達 <3 mm。
無刷式DC馬達直徑僅40 mm,卻可提供高達50瓦特的功率。為了使Delta並聯式機器人同時擁有高速和精準度,還必須精確測量馬達的角度位置。因此,設計時將微型馬達直接與高解析度旋轉編碼器連接,以準確掌握其位置。除此之外,每顆馬達都配備了由Asyril自家設計的停駐煞車器。這裡所指的是利用彈簧支撐馬達軸的小型插銷。在機器人運行期間,以電磁石將這些插銷吸開,便可鬆開煞車器。控制裝置完全內建於機器人體內,通訊則經Ethernet介面進行。由於擁有上述特性,這個迷你機器人非常適合用於快速推移或組合小型元件。而在速度和精準度方面,這架機器人在同等級產品中絕對拔得頭籌。Pocket Delta的結構還擁有另一項優勢-它可以擺脫對減速機的依賴。
Pocket Delta並聯式機器人被運用於多種工業領域,尤其是鐘錶工業對微型零件的分類、挑選及加工,更是它的拿手項目。因此,這個安裝方案幾乎適用於處理機械鐘錶內的所有部件,例如螺絲、鉚釘、栓銷或齒輪。而且不只如此--在醫療技術和電子/半導體工業中,Pockelt Delta也受到廣泛的運用。在這些領域裡,最常需要運輸的零件尺寸多在0.5至15 mm之間。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}